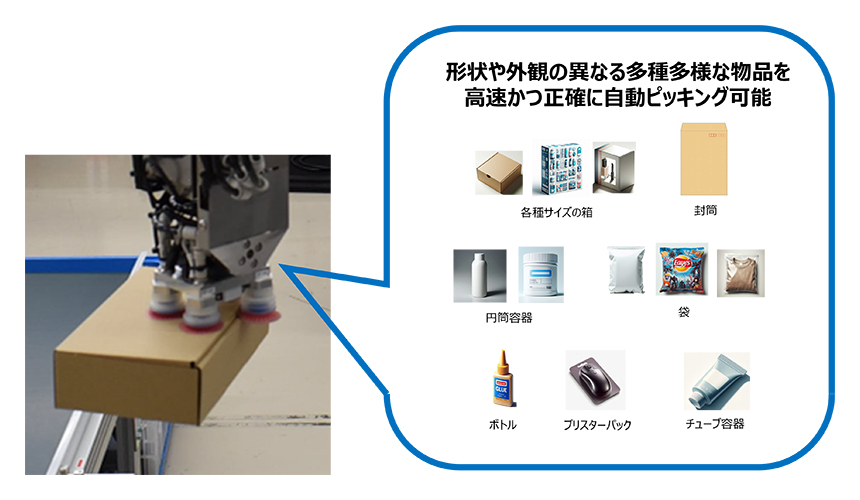
東芝は、深層学習を使って複数の吸着パッドを持つロボットハンドがピッキングする対象物の形状や姿勢に合わせて掴む位置と掴み方(把持計画)を正確かつ高速に計算するAI技術を開発した。
「把持計画」は、ロボットが物体を正確に掴むための「位置推定」と「姿勢推定」から計算され、ピッキングロボットは、正確な把持計画を計算することで効率的かつ確実に物体を取り扱うことができ、従来自動化が難しかった、乱雑に置かれた、形状や外観の異なる物品のピッキング作業を自動化することができるようになる。
https://www.global.toshiba/jp/technology/corporate/cmc/news/2024/2410-01.html