



NICTとトヨタ自動車、製造現場における無線システム安定化技術の実験に成功
無線可視化と異種システム協調制御で“止まらないライン”実現
NICT(情報通信研究機構)とトヨタ自動車は、製造現場で使われる無線システムの安定化技術の実験に成功し、「止まらない生産ライン」を実現した。
工場内はさまざまな電波が飛んでおり、時にはそれがノイズとなって遅延や障害発生の原因になる。無線の伝播状況を見える化し、干渉のないように設計して運用することでトラブルを避けられるが、①電波は目に見えない ②電波を発する電子機器はさまざまあり、人が持ち込むような予期せぬ電波もある ことから、高精度なものづくりを志向する現場では、無線の有効性は理解されつつも、その利用が敬遠されることが多かった。
それに対しNICTとトヨタ自動車は、①無線の可視化によって登録外の端末の持込みを検出し、計画外の無線の混雑を抑制する技術と、②それでも発生してしまう突発的な干渉を異種システム協調制御によって回避する技術を開発し、それを実際に稼働中のトヨタ自動車の2カ所の工場で実証し、無線システムを有効利用しながら「止まらない生産ライン」を実現した。
◆ポイント◆
①NICTとトヨタ自動車は稼働中の工場で無線システムの安定化の実験に成功
②無線の可視化技術をトヨタ自動車の稼働中の組立ラインで検証、登録外端末の持込みを検出
③SRF無線プラットフォームによる異種システム協調制御を検証、突発的な無線混雑を回避
実験の背景
製造現場では、生産性向上のため生産設備の柔軟性を高める目的で、無線通信を用いた製造システムの導入が年々進み、今後も増加すると予想されている。しかしながら製造現場ではモバイルルータなど人に付随する無線通信が意図せず製造ラインにおける無線システムに悪影響を及ぼす場合がある。
こうした事態を避けるため、両社は2015年から「製造現場の無線環境の可視化」に共同で取り組み、人が電波を発する端末と共に現場内を移動した際に、端末からの電波が到達する範囲をセンサーにより可視化する技術を開発してきた。
また、多くの生産設備やラインで無線通信が使われるようになると、それぞれの無線システム間の干渉による通信の不安定化や設備稼働に影響を与える可能性がある。それに対しNICTでは、2015年から製造現場の無線化を推進するFlexibleFactory Projectの活動を実施し、異種無線通信を協調制御することよって無線通信を安定化させる「SRF無線プラットフォーム」の研究開発を行ってきた。
17年7月にはSRF無線プラットフォームに高い関心を持つ企業と共に「FFPA(フレキシブルファクトリパートナーアライアンス)」を設立し、技術仕様の標準化を行い、19年9月にはSRF無線プラットフォームの技術仕様書ver.1.0を発行するなど、技術開発を進めてきた。
成果
両社は、稼働中のトヨタ自動車の2つの工場で無線システムの安定化技術の共同実験を実施した。NICTが実験システムの構築と実験の実施、データ分析を担い、トヨタ自動車が実験環境の整備と実験の支援を行った。
1つ目は無線環境のリアルタイム可視化技術の効果検証で、2019年末からトヨタ自動車高岡工場の組立ラインで行われた。
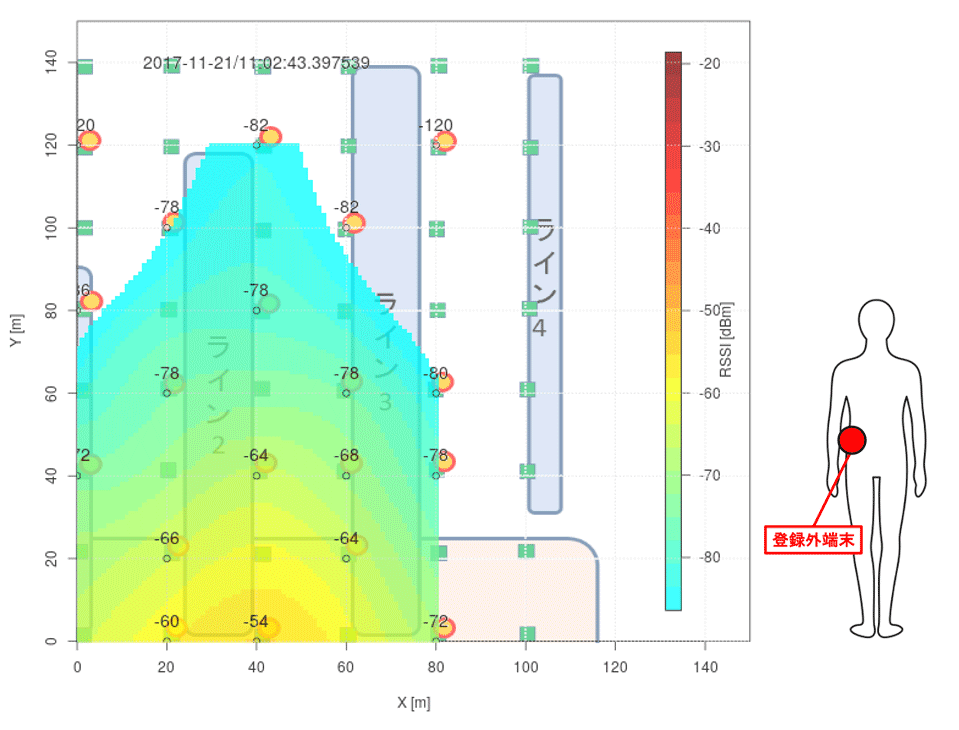
はじめに、設置したアクセスポイントからの電波がどこまで届いているかを管理画面上のフロアマップで可視化し、もともと予定してあった電波環境を見える化。次に、事前に登録されていないモバイルルータなどの無線端末を持ち込み、それを検出してアラートを表示して管理者に注意喚起を行った。
数か月にわたって効果検証を行い、電波到達範囲の可視化と登録外端末の検出が可能であることを確認。今後、トヨタ自動車は、製造現場での無線システムの適切な管理のため、この可視化技術を他の工場にも順次導入していく予定としている。
2つ目は、異種システム協調制御の実環境での機能検証で、トヨタ自動車元町工場を舞台としてSRF無線プラットフォームの実証実験を実施した。
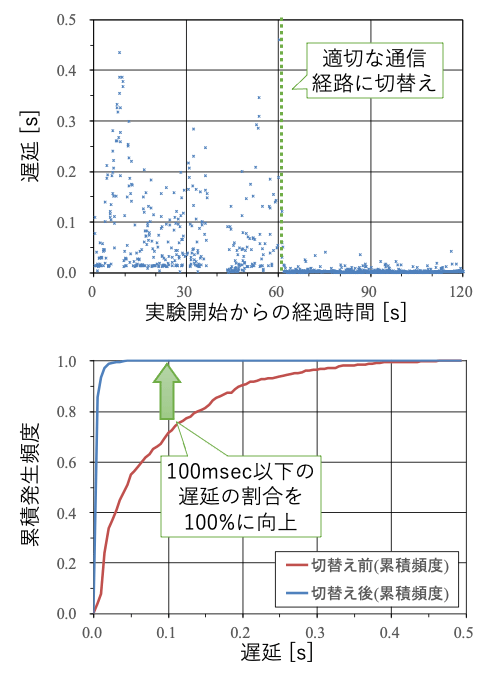
同プラットフォームは、他の無線システムとの協調制御を行うため、無線の環境を常に監視し、無線が重なって環境が悪化する場合、適切な通信経路や通信方式を動的に選定して切り替える。
実験では、トヨタ自動車元町工場の製造ラインで使われているものと同じ周波数帯の試験用通信を発生させ、この試験用通信の遅延を評価しました。Field Manager(管理サーバ)で制御して適切な通信経路に切り替えることで、遅延が大幅に低減でき、100msec以下の遅延を満たす割合を100%に向上することができた。
100msec以下の遅延を保証することにより、無線化が検討されている製造システムの8割以上を安定稼働させることができる。この結果によってSRF無線プラットフォームを使うことで実際の製造ラインに新しい無線アプリケーションを導入した際でも要求遅延を満たすことができることが分かった。
2つの実験の成功により、無線の可視化によって登録外の端末の持込みを検出することで、計画外の無線の混雑を抑制することと、それでも発生してしまう突発的な干渉をSRF無線プラットフォームで回避することで、“止まらないライン”を実現できることが分かった。
今後の展望
今後、NICTは、無線環境のリアルタイム可視化技術をトヨタ自動車の他の工場に順次展開し、実証実験を継続、実用化を目指す。
SRF無線プラットフォームは、実験の結果を生かし、工場において安定した無線通信を利活用できるプラットフォームとして実用化を目指して研究開発および標準仕様の策定と認証制度の整備を推進していく。
実験された2つの技術
1.無線環境のリアルタイム可視化技術
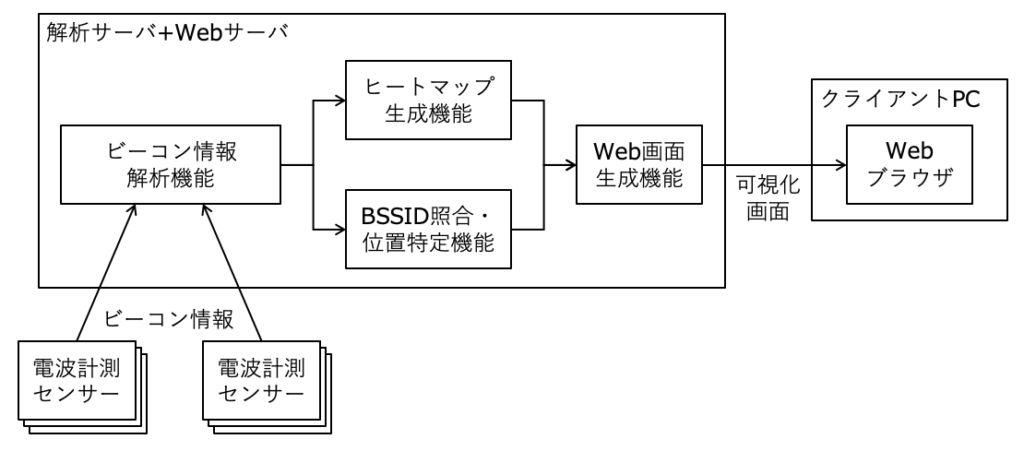
電波計測用のセンサーからのビーコン情報を収集・統合し、その情報を解析した結果を管理画面上のフロアマップ上に描画。複数のセンサーから収集したビーコン情報を基にフロア内の電波強度の変化を推定することで電波到達範囲を可視化する。
また、ビーコンのBSSIDの情報を基に登録端末か否かを照合し、登録外端末の場合は電波強度からその位置を特定できる。
2.SRF無線プラットフォーム
Field Manager(管理サーバ)が複数の無線システム間のリソースの調整を行うグローバル制御を行い、SRF Gateway/Device(無線機器)が単一の無線システム内の通信を最適化するローカル制御を行う。
無線環境センサーからの情報を基に、グローバル制御とローカル制御が協調連携して、他のアプリケーションの通信状況に応じて通信に使用するチャネルや通信速度を適応的に制御し、無線区間での干渉を回避して通信遅延の抑制を実現する。


